Энкодеры MagnTek для определения углов поворота
11 марта
Сергей Попов, Алексей Попов (г. Воронеж)
Интегральные схемы MagnTek для построения магнитных энкодеров отличаются высоким уровнем функциональных, эксплуатационных и экономических характеристик. Они созданы по собственным разработкам компании и являются достойной заменой, а по многим параметрам и превосходят продукцию недоступных брендов. Со склада КОМПЭЛ доступны микросхемы этого производителя для магнитных энкодеров автомобильного (MT6501CT-ADD) и индустриального (MT6701CT-STD, MT6813CT-LAC) классов.
Магистральный путь развития современных технических систем – всеобъемлющая комплексная автоматизация на основе микроконтроллеров и микропроцессоров (устройств обработки информации), все более совершенных разнообразных датчиков (первичных источников информации об окружающей среде и техническом состоянии объектов) и каналов связи с высокой пропускной способностью и помехозащищенностью.
Среди различных вариантов современных сенсоров важное место занимают датчики углового положения различных валов, осей, роторов, заслонок, поворотных переключателей, рычагов, манипуляторов относительно соответствующих неподвижных деталей. В частных случаях они могут называться датчиками положения ротора (ДПР), входящими в состав вентильных электродвигателей, BLDC, БДПТ, PMSM, энкодерами, резольверами. Актуальность и масштабы применения датчиков угла поворота можно наглядно оценить на примере современного автомобиля (рисунок 1). Аналогичная картина наблюдается и в других областях техники.

Рис. 1. Применение датчиков MagnTek в современном автомобиле
К современным датчикам предъявляется довольно много требований:
- точное воспроизведение контролируемой величины в выходном сигнале сенсора:
- статическая точность характеризуется интегральной ошибкой (нелинейностью), то есть отклонением фактической передаточной характеристики от номинальной, и шумами измерений;
- динамическая точность характеризуется полосой пропускания датчика и задержкой получения результата.
- устойчивость ко внешним воздействующим факторам (климатическим и механическим), в том числе сохранение исправности после экстремальных воздействий и приемлемо небольшая деградация точности при умеренных воздействиях в пределах рабочих диапазонов;
- малая чувствительность к мешающим факторам, например, датчики углового положения не должны, насколько возможно, реагировать на перекосы или радиальные и осевые смещения между контролируемым валом и валом самого датчика;
- габаритные размеры и/или масса датчика (предпочтение отдается сенсорам, которые можно интегрировать в контролируемое устройство);
- приемлемо малое энергопотребление хотя бы для обеспечения допустимого температурного режима датчика;
- продолжительный ресурс работы, небольшая интенсивность отказов. В автомобилестроении и некоторых других областях техники может требоваться безусловная безотказность, что достигается резервированием датчиков;
- невысокая стоимость;
- доступность в требуемых количествах.
С учетом конкретных особенностей того или иного применения в разных сегментах индустрии востребованы сенсоры с различными сочетаниями свойств. Приоритетными могут быть статическая точность, быстродействие, высокая надежность, габариты, устойчивость ко внешним воздействиям, минимальная цена и другие параметры. Поэтому в промышленности востребованы датчики с разными сочетаниями характеристик, но наиболее широко применяются приборы с наилучшим компромиссом всех вышеуказанных свойств, не имеющие «слабых мест».
Датчики углового положения могут быть реализованы на различных физических принципах. Некоторые варианты показаны на рисунке 2.

Рис. 2. Принципы действия некоторых датчиков углового положения: а) потенциометр; б) фотоэлектрический датчик; в) магнитный энкодер
Наиболее простым решением является потенциометр – резистивный делитель напряжения с подвижным контактом, управляемый контролируемым валом. Сам по себе потенциометр (рисунок 2а) экономичен и пригоден для массового производства. Однако у такого датчика немало недостатков, таких как:
- ограниченный ресурс работы (даже у специальных типов потенциометров с износостойким пластиковым резистивным элементом – не более нескольких десятков миллионов оборотов);
- относительно высокий уровень шума;
- применение только для низких частот вращения;
- большой момент трения (сопротивления вращению);
- немалые размеры (для обеспечения надежности);
- внешнее сопряжение с контролируемым валом (неинтегральная конструкция);
- сравнительно большие погрешности преобразования (нелинейность и нестабильность).
Значительные дополнительные затраты на оборудование, обеспечивающее питание потенциометра, обработку его выходного напряжения и интерфейс датчика, обесценивают простоту принципа действия. Практически потенциометры находят ограниченное применение для контроля углового положения тихоходных валов при невысоких требованиях к точности.
Фотоэлектрические датчики углового положения (рисунок 2б) содержат системы светоизлучающих и фотоприемных элементов, кодовые маски – неподвижную на статоре и подвижную на роторе, которые совместно реализуют нониусный принцип получения высокого разрешения измеряемого углового положения, декодирующую схему и интерфейс. Такие датчики потенциально обеспечивают наиболее высокую точность и разрешающую способность. Они бесконтактные, имеют малый момент сопротивления вращению и большой ресурс работы. Принципиально достижима достаточно высокая скорость обновления информации об угловом положении вала, а также допустима его высокая частота вращения.
Однако у фотоэлектрических датчиков имеются и значительные проблемы. Высокие точностные характеристики достигаются только при значительной стоимости (за счет дорогих прецизионных комплектующих и весьма тщательной сборки и юстировки), низких частотах вращения и малых погрешностях механического сопряжения контролируемого вала с валом датчика. У фотоэлектрических датчиков имеется принципиальная уязвимость к таким эксплуатационным и климатическим факторам, как выпадение инея, росы и запыленность воздуха.
Магнитный датчик углового положения (рисунок 2в) содержит постоянный магнит на вращающемся валу и одну или несколько магниточувствительных микросхем на статоре. При необходимости он может быть интегрирован в контролируемое устройство (постоянный магнит датчика устанавливается непосредственно на вал устройства). У датчика такого типа самая высокая устойчивость к различным механическим и климатическим воздействующим факторам. Это бесконтактный сенсор с малым моментом сопротивления вращению и большим ресурсом работы. Принципиально достижима достаточно высокая скорость обновления информации об угловом положении вала, а также допустима его высокая частота вращения. Магнитный датчик может иметь невысокую стоимость (по крайней мере он обеспечивает наилучший компромисс между точностью, устойчивостью, надежностью и стоимостью, по сравнению с другими датчиками угла) и пригоден для массового производства и применения. Магнитные энкодеры уступают фотоэлектрическим по предельно достижимой точности, однако их неуклонный прогресс в повышении точности сокращает нишу применения фотоэлектрических энкодеров.
До появления специализированных больших интегральных микросхем, обеспечивших впечатляющий прогресс фотоэлектрических, особенно магнитных энкодеров, в качестве датчиков углового положения широко применялись информационные электрические машины: вращающиеся трансформаторы, сельсины, индуктосины, редуктосины, емкостные датчики, нередко объединяемые наименованием «резольверы» (рисунок 3б). Они отличаются надежностью и устойчивостью к воздействующим факторам, в том числе к ионизирующей радиации. Однако высокая стоимость и малые объемы производства определяют их ограниченное применение в таких областях, как военная и аэрокосмическая техника, частично автомобилестроение и промышленное оборудование.
Для реализации магниточувствительных микросхем, используемых в магнитных энкодерах, задействуют постоянный магнит в качестве модулятора (источника магнитного поля) и различные физические эффекты (рисунок 3):
- эффект Холла, при котором постоянный магнит задействован в качестве модулятора (рисунок 3а);
- индукционный эффект, когда в датчике применяется ВЧ-несущая электромагнитного поля с модуляцией магнитной проводимости кодовым диском на роторе (рисунок 3б);
- магниторезистивный эффект (рисунок 3в):
- AMR-анизотропный;
- TMR-туннельный;
- GMR-гигантский (спинтроника).
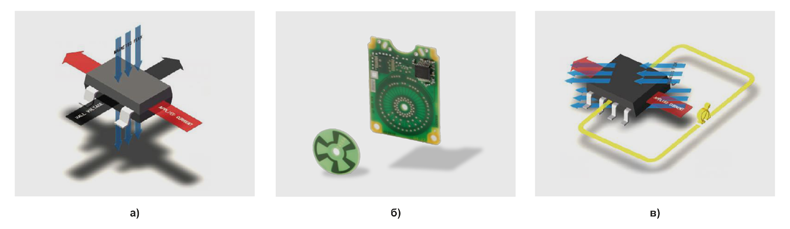
Рис. 3. Физические эффекты, используемые в магнитных энкодерах: а) эффект Холла; б) индукция; в) магниторезистивный эффект
Эффект Холла, открытый в 1879 году, хорошо интегрируется на кремниевый чип. При этом обеспечивается чувствительность к составляющей магнитного поля, перпендикулярной поверхности чипа, как показано на рисунке 3а. Такой датчик – недорогое решение, однако его низкая чувствительность ведет к невысокой точности. В настоящее время магниточувствительные ИМС на эффекте Холла занимают около 65% рынка.
Магниторезистивные датчики чувствительны к касательной составляющей (поверхности ИМС) магнитного поля. Благодаря дифференциальному/мостовому включению магниторезистивных элементов достигается высокая чувствительность. Такие сенсоры выгодно отличаются хорошим быстродействием и малым потреблением. В настоящее время магниточувствительные магниторезистивные ИМС занимают около 35% рынка с тенденцией к увеличению.
Важное преимущество магнитных датчиков угла – возможность их интеграции непосредственно в контролируемое устройство. На вал устанавливается малогабаритный постоянный магнит, а магниточувствительные микросхемы распаиваются на неподвижной печатной плате. При этом возможны 2 варианта компоновки датчика:
- микросхемы смещены относительно оси вращения вала (как правило, комплекты из 2, 3 или 4 магниточувствительных микросхем устанавливаются симметрично оси, хотя есть вариант и с одной микросхемой);
- одна магниточувствительная микросхема устанавливается соосно контролируемому валу (рисунок 4).
Изначально магнитные датчики были реализованы по первому варианту исполнения (с симметричной установкой нескольких магниточувствительных элементов). Такой способ привлекателен возможностью установки магниточувствительных элементов с радиальным зазором относительно цилиндрического постоянного магнита предельно близко к его полюсам (радиальный зазор можно выдерживать существенно точнее и стабильнее, чем осевой). Это улучшает точность работы датчика при нечувствительности к осевым перемещениям контролируемого вала. Кроме того, важно, что такой датчик может быть установлен в разных местах вала, а не только на консольном вылете, как сенсор со вторым вариантом реализации). Однако необходимость использовать несколько магниточувствительных микросхем, которые к тому же требуется установить на плате с довольно высокой геометрической точностью (не забываем также о погрешностях расположения магниточувствительных элементов внутри корпусов микросхем) заметно усложняет и удорожает такой датчик, а также ухудшает его характеристики.
С появлением возможности реализации высокоинтегрированного магниточувствительного решения (комплекта магниточувствительных элементов, усилителей, АЦП и процессора цифровой обработки сигналов в одном корпусе ИМС) стал актуален второй вариант компоновки датчика (рисунок 4а). Специальные алгоритмы обработки сигналов комплекта магниточувствительных элементов обеспечивают малое влияние вариации осевого зазора между микросхемой и магнитом на точность определения углового положения и необременительные требования к характеристикам постоянного магнита. В настоящее время второй вариант компоновки (соосное расположение микросхемы) стал основным и интенсивно совершенствуется.

Рис. 4. Варианты компоновки магнитных датчиков угла: а) соосная установка одной магниточувствительной микросхемы; б) несоосная установка нескольких магниточувствительных микросхем
Рассмотрим принцип работы магнитного энкодера с соосным расположением магниточувствительной ИМС относительно вала. Магнитное поле малогабаритного двухполюсного постоянного магнита с радиальным направлением намагничивания, который закреплен на консольном вылете контролируемого вала (ротора), считывается массивом элементов Холла или магниторезистивными мостами, компактно размещенными в микросхеме около пересечения с осью вращения вала и по возможности симметрично относительно нее.
Например, два полных моста магниторезистивных элементов, ортогонально расположенных между собой, выдают при вращении вала два сигнала, изменяющихся приблизительно как синус и косинус угла поворота (рисунок 5). Амплитуды этих сигналов пропорциональны намагниченности постоянного магнита, а также зависят от осевого зазора между его торцом и микросхемой. Но эти факторы одинаково влияют на оба сигнала (синусный и косинусный) и поэтому могут быть эффективно компенсированы при их обработке цифровым сигнальным процессором, который вычисляет оценку текущего углового положения вала относительно микросхемы. Это позволяет использовать недорогие малогабаритные постоянные магниты и не требует установки и поддержания точного значения осевого зазора между торцом магнита и микросхемой. Специальные алгоритмы цифровой обработки обеспечивают ослабление влияния несоосности расположения микросхемы и внешних магнитных полей на точность определения угла. Все это позволяет создать недорогой, надежный, неприхотливый в эксплуатации и малогабаритный датчик углового положения встроенный конструкции.
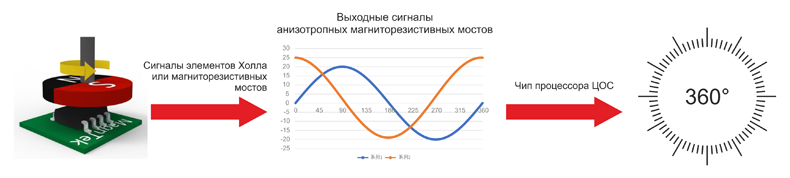
Рис. 5. Принцип работы магнитного энкодера с соосным расположением магниточувствительной ИМС относительно контролируемого вала
С развитием технологий сформировались различные варианты интерфейсов датчиков углового положения для передачи результатов измерений потребителю (рисунок 6). Среди них:
- аналоговые сигналы двух полных мостов анизотропных магниторезистивных элементов, ортогонально расположенных между собой (рисунок 6а);
- ШИМ (рисунок 6б);
- интерфейс инкрементального энкодера (рисунок 6в);
- линейный аналоговый сигнал как у потенциометра (рисунок 6г);
- стандартные цифровые протоколы I2C и SPI (рисунок 6д);
- сигнал ДПР в трехфазном BLDC, когда используются 3 цифровых меандра со взаимным сдвигом на 120⁰ (рисунок 6е).
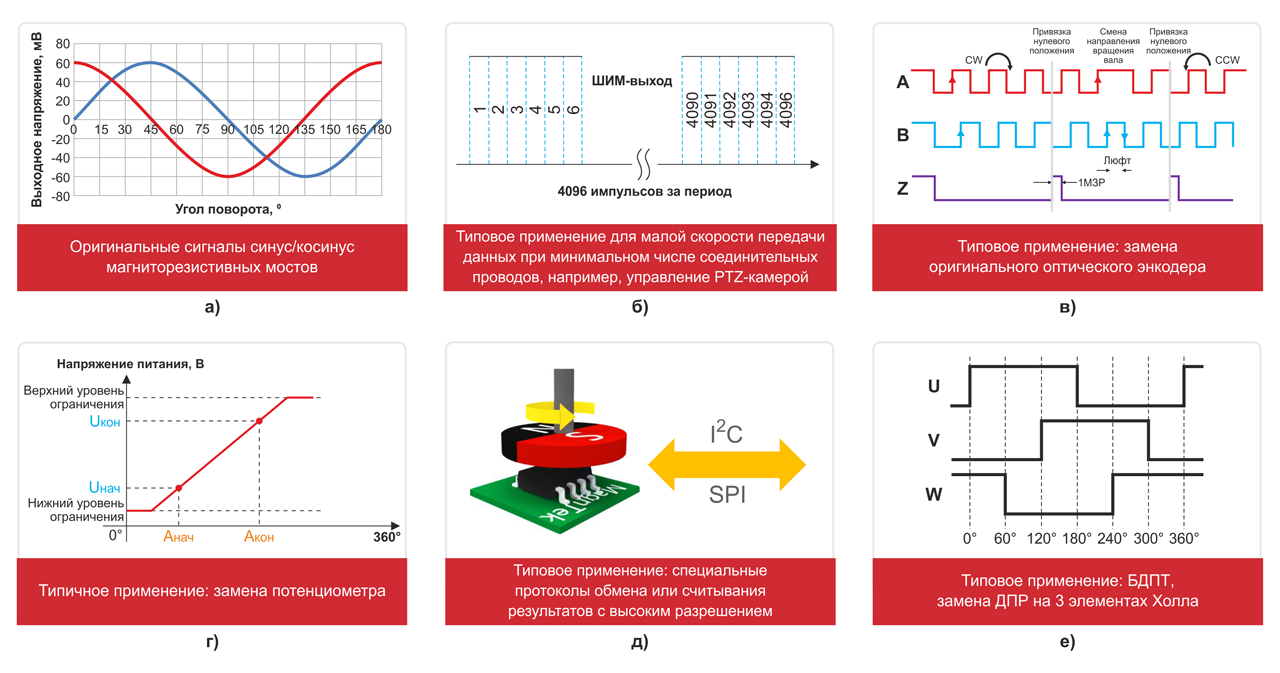
Рис. 6. Варианты интерфейсов датчиков углового положения
В значительной мере выбор интерфейса определяется областью применения (назначением) датчика положения, поэтому для универсальных микросхем предпочтительно иметь максимально широкий набор различных интерфейсов, предоставляя пользователю возможность выбора наиболее удобного варианта.
Аналоговые сигналы «синус/косинус» с выходов магниторезистивных мостов применялись в микросхемах предыдущих поколений. В современных ИС эти сигналы обрабатываются «внутри», получая оценку углового положения в более удобном виде.
ШИМ сигнал (обычно 4096 импульсов за период), кодирующий значение угла коэффициентом заполнения, привлекателен возможностью передачи по однопроводной линии. Однако он применим только для медленного обмена данных (до 2000 значений угла в секунду).
Интерфейс инкрементальных энкодеров широко применяется в фотоэлектрических датчиках угла. Два импульсных сигнала «А» и «В» с заполнением примерно 0,5 периода и со сдвигом между ними примерно 0,25 периода кодируют относительные перемещения вала на определенный небольшой угол (микрошаг). В зависимости от того, какой из сигналов — «А» или «В» — опережает другой, определяется текущее направление вращения: по или против часовой стрелки (на рисунке 6в показан интервал смены направления вращения и поведение сигналов «А» и «В»). Для привязки информации инкрементальных сигналов к абсолютному положению используется дополнительный сигнал «Z», который формирует узкий импульс (на величину сдвига между «А» и «В») при вполне определенном положении вала.
Аналоговый сигнал напряжения, пропорциональный углу поворота вала и напряжению питания в некотором диапазоне углов, типичен для потенциометрического датчика. Если магнитный энкодер заменяет потенциометр, возможен усовершенствованный интерфейс: программируемые верхний и нижний уровни ограничения напряжения и программируемая кусочно-линейная аппроксимация передаточной характеристики датчика.
Для построения проприетарных оригинальных протоколов обмена данных с датчиком угла, а также для считывания результатов оценок угла с наиболее высоким разрешением удобно применять стандартные протоколы последовательного обмена I2C и SPI.
Для использования энкодеров в качестве ДПР бесконтактных двигателей постоянного тока необходима эмуляция стандартного протокола таких ДПР. Наиболее распространены трехфазные БДПТ. Соответствующие ДПР должны генерировать 3 импульсных сигнала, обозначаемых «U», «V» и «W», с заполнением 0,5 (180 электрических градусов) и со взаимным сдвигом 0,333 (120 электрических градусов). Они задают 6 интервалов коммутации обмоток двигателя на пару полюсов. Последовательность чередования сигналов связана с направлением вращения. В зависимости от числа пар полюсов БДПТ за один механический оборот ротора формируются несколько периодов сигналов «U», «V» и «W». Очень удобно, когда магнитный энкодер (универсальное решение с двухполюсным магнитом) может программироваться для эмуляции ДПР БДПТ с различным числом полюсов, то есть применяться в самых разных двигателях.
Качественные и надежные микросхемы для построения магнитных датчиков угла выпускают ведущие мировые производители. Один из них – китайская компания Shanghai MagnTek Microelectronics Inc. (MagnTek), основанная в 2009 году и специализирующаяся на разработке, производстве и продажах микросхем, работающих на магнитных эффектах (Холла и магниторезистивном). За 5 лет работы (с 2016 по 2021 гг.) инженеры MagnTek последовательно разработали 4 поколения микросхем для построения магнитных энкодеров индустриального применения (таблица 1).
Одновременно с этим шла разработка микросхем автомобильного класса с повышенными гарантиями безотказной работы. За 4 года напряженной работы было создано первое поколение таких микросхем – MT6501, и к 2022 г. поставлено более 5 млн штук производителям автомобильного оборудования. В конце 2021 г. MagnTek представил усовершенствованную микросхему второго поколения – MT6511. Ее поставки начались во втором квартале 2022 г. (таблица 2).
Таблица 1. Микросхемы MagnTek для построения магнитных энкодеров индустриального класса
| Наименование | Корпус |
|---|---|
| MT6813CT, MT6815CT | SOP-8 |
| MT6813QT | QFN3×3 |
| MT6701CT | SOP-8 |
| MT6701QT | QFN3×3 |
| MT6816CT | SOP-8 |
| MT6825GT | TSSOP-16 |
| MT6835GT | TSSOP-16 |
| MT6828JT | QFN4×4 |
Таблица 2. Микросхемы MagnTek для построения магнитных энкодеров автомобильного класса
| Наименование | Корпус |
|---|---|
| MT6501CT MT6501GT |
SOP-8 TSSOP-16 |
| MT6511CT MT6511GT |
SOP-8 TSSOP-16 |
Микросхемы MagnTek функционально аналогичны продукции конкурентов, но по существу являются оригинальными разработками с использованием собственных конструктивных и технологических решений компании. Микросхема четвертого поколения по комплексу параметров превосходит основных конкурентов.
В таблице 3 представлен прогресс основных характеристик интегральных схем MagnTek для построения магнитных энкодеров индустриального класса. Последовательно представлены 4 поколения: MT6804 → MT6815 → MT6825 → MT6835.
Таблица 3. Четыре поколения микросхем MagnTek для построения магнитных энкодеров индустриального класса
| Характеристики/Наименование | MT6804 | MT6815 | MT6825 | MT6835 |
|---|---|---|---|---|
| Типовая погрешность, ° | <±1,25 | <±1 | <±0,5 | <±0,05 |
| Задержка получения результата, мкс | 20 | 100…400 | 2 | 2 |
| Разрешение в составе инкрементального энкодера (A, B, Z) | 8…11 бит | 7…12 бит | Программируемое число микрошагов на оборот из диапазона 1…4096 | Программируемое число микрошагов на оборот из диапазона 1…16384 |
| Возможные варианты эмуляции ДПР БДПТ (U, V, W) | 2/4/6/16 пар полюсов | 1…8/10/12/14/16 пар полюсов | 1…16 пар полюсов | 1…16 пар полюсов |
| Разрешение внутренней оценки углового положения, бит | 14 | 14 | 18 | 21 |
| Максимально возможная частота вращения вала, об/мин | 6000 | 8000 | 25000 | 120000 |
| Целевые области применения |
|
|
|
|
Новейшие разработки микросхем MagnTek для построения магнитных энкодеров индустриального класса полностью конкурентоспособны, а по некоторым параметрам превосходят продукцию конкурентов (таблица 4). Интегральная схема MT6835 заинтересовала ведущих мировых поставщиков сервоприводов. Микросхемы MT6701CT-STD и MT6813CT-LAC доступны для заказа со склада КОМПЭЛ.
Таблица 4. Сравнение лучших микросхем для построения магнитных энкодеров индустриального класса
| Характеристики/Наименование | MagnTek | Продукция конкурирующих компаний | |||
|---|---|---|---|---|---|
| MT6835 | MT6825 | TLEххх | TADххх | AK7ххх | |
| Магниточувствительные элементы | Анизотропный магниторезистивный эффект | Анизотропный магниторезистивный эффект | Гигантский магниторезистивный эффект | Туннельный магниторезистивный эффект | Эффект Холла |
| Требуемая индукция поля постоянного магнита, мТ | >30 | >30 | 30…60 | 20…80 | >40 |
| Абсолютная погрешность измерения угла, ° | ±0,02 | ±0,5 | ±1 | ±0,1 | ±0,5 |
| Диапазон измерения угла, ° | 0…360 | 0…360 | 0…360 | 0…360 | 0…360 |
| Шум измерения угла (эффективное значение), ° | 0,002 | 0,002 | 0,05 | 0,004 | 0,007 |
| Ток питания, мА | 20 | 10 | 14 | 10 | 20 |
| Задержка получения результата, мкс | <2 | <2 | >50 | 10 | 1,8 |
| Программирование режима инкрементального энкодера, микрошагов на оборот | 1…16384 | 1…4096 | Не более 1024 | 1…4096 | 1…4096 |
| Количество пар полюсов при эмуляции ДПР БДПТ | Любое из диапазона 1…16 | Любое из диапазона 1…16 | Любое из диапазона 1…16 | Любое из диапазона 1…16 | Любое из диапазона 1…32 |
| Поддержка ШИМ-выхода | Да | Да | Да | Да | Нет |
| Поддержка SPI | 4-проводной SPI | 4- или 3-проводной SPI | 3-проводной SPI | 4-проводной SPI | 4-проводной SPI |
| Разрешение внутреннего представления оценки углового положения, бит | 21 | 18 | 15 | 16 | 14 |
Микросхемы MT6501CT и MT6501GT первого поколения для построения магнитных энкодеров автомобильного класса показаны на рисунке 7 (корпусированные и перед опрессовкой). Как видно из рисунка, интегральная схема MT6501CT имеет стандартный корпус SOP-8, но внутри у нее гибридная двухчиповая конструкция: чип с двумя ортогональными магниторезистивными мостами и кремниевый чип-обработчик. Микросхема MT6501GT, выполненная в стандартном корпусе TSSOP-16 и обеспечивающая дублированное исполнение датчика, содержит 4 чипа.

Рис. 7. Внешний вид и внутреннее устройство микросхем MT6501CT и MT6501GT первого поколения для построения магнитных энкодеров автомобильного класса
Микросхема MT6501 подходит для замены MLXххх. Она является оригинальной разработкой MagnTek, ни в чем не уступает, а по некоторым характеристикам превосходит конкурента (таблица 5).
Таблица 5. Сравнение микросхем для построения магнитных энкодеров автомобильного класса
| Характеристики/Наименование | MT6501 | MLXххх |
|---|---|---|
| Магниточувствительные элементы | Анизотропные магниторезисторы | Элементы Холла |
| Максимально допустимое перенапряжение по питанию, В | 24 | 24 |
| Максимально допустимое напряжение питания при обратной полярности, В | -24 | -12 |
| Максимально допустимое напряжение на выходе, В | 24 | 18 |
| Уровень шума на выходе | 0,0002 × UПИТ | 0,0005 × UПИТ |
| Варианты режимов программирования | Однопроводное программирование или SPI | Однопроводное программирование |
| Диапазон рабочих температур, °С | -40…150 | -40…150 |
| Возможности кусочно-линейного программирования передаточной характеристики | Разбиение передаточной характеристики в любых 4 точках | Разбиение в любых 4 точках или 17 точек с равным шагом по углу |
| Диапазон измеряемых углов, ° | 0…360 | 0…360 |
| Поддержка ШИМ-выхода | Да | Да |
| Погрешность измерения угла, ° | ±1 | ±1 |
| Соответствие стандартам AECQ-100 на автомобильное электронное оборудование | Соответствует | Соответствует |
Микросхема второго поколения MT6511 заменяет как MLXххх, так и HALххх (таблица 6). По ряду параметров оригинальная разработка MagnTek превосходит конкурентов. На складе КОМПЭЛ для заказа доступна модель MT6501CT-ADD.
Таблица 6. Сравнение микросхем для построения магнитных энкодеров автомобильного класса
| Характеристики/Наименование | MT6511 | MLXххх | HALххх |
|---|---|---|---|
| Магниточувствительные элементы | Горизонтальные элементы Холла в дифференциальном включении | Горизонтальные элементы Холла с концентраторами магнитного потока | Горизонтальные элементы Холла в дифференциальном включении |
| Максимально допустимое перенапряжение по питанию, В | 30 | 24 | 28 |
| Максимально допустимое напряжение питания при обратной полярности, В | -18 | -14 | -18 |
| Максимально допустимое напряжение на выходе, В | 30 | 24 | Нет данных |
| Диапазон рабочих температур, °С | -40…+150 | -40…160 | -40…160 |
| Рабочий диапазон поля постоянного магнита, мТ | 10…90 | 10…67 | 10…130 |
| Размерность магнитного поля | 2D | 3D | 3D |
| Варианты режимов программирования | OWI, SPI | OWI | SPI |
| Поддержка эмуляции потенциометра | Да | Да | Нет |
| Возможности кусочно-линейного программирования передаточной характеристики | Разбиение в любых 8 точках или 17 точек с равным шагом по углу | Разбиение в любых 8 точках или 17/32 точек с равным шагом по углу | Нет данных |
| Поддержка SPI | Да | Нет | Да |
| Поддержка ШИМ-выхода | Да, с возможностью выбора частоты считывания в диапазоне 125…2000 Гц | Да | Поддерживается в некоторых моделях |
| Поддержка SWO-выхода | Да | Нет | Нет |
| Соответствие стандартам AECQ-100 на автомобильное электронное оборудование | Соответствует | Соответствует | Соответствует |
| Реализация резервирования | 2 чипа, 2 земли, 2 шины питания | 2 чипа, 2 земли, 2 шины питания | Резервирование на одном чипе |
| Уровни соответствия стандарту ISO26262 | ASIL-B и ASIL-D, в зависимости от способа подключения | ASIL-B (ASIL-C для некоторых моделей) | ASIL-B |
Компания MagnTek разработала и наладила массовое производство разнообразных микросхем для построения магнитных энкодеров с соосным расположением интегральной схемы относительно контролируемого вала – наиболее современного решения для построения датчиков угла. Эти микросхемы отличаются с оптимальным соотношением функциональных, эксплуатационных и экономических характеристик и представляют собой оригинальные разработки компании и с успехом заменяют продукцию недоступных брендов. MagnTek продолжает работу по дальнейшему совершенствованию этой линейки, а наиболее востребованная продукция для построения магнитных датчиков углового положения доступна со склада КОМПЭЛ.
 Компания Shanghai Magntek Microelectronics Inc. (MagnTek), основанная в 2009 году в Шанхае – одна из лидирующих в Азии в производстве датчиков магнитного поля, скорости и энкодеров на основе эффекта Холла.
В 2019 году компания MagnTek объединилась с основанным в 2012 году в том же Шанхае крупным холдингом QST, изначально специализировавшимся на инерциальных MEMS-датчиках и к 2022 году интегрировавшим также производства электромагнитных модульных датчиков для автопрома, датчиков контроля парамет ...читать далее
Компания Shanghai Magntek Microelectronics Inc. (MagnTek), основанная в 2009 году в Шанхае – одна из лидирующих в Азии в производстве датчиков магнитного поля, скорости и энкодеров на основе эффекта Холла.
В 2019 году компания MagnTek объединилась с основанным в 2012 году в том же Шанхае крупным холдингом QST, изначально специализировавшимся на инерциальных MEMS-датчиках и к 2022 году интегрировавшим также производства электромагнитных модульных датчиков для автопрома, датчиков контроля парамет ...читать далее
Наши информационные каналы